CPS Geometry
Nick Trif
Version 1.0 - January 2017
1. Assumptions
Close Packed Singularity Geometry - or the CPS Geometry is the geometry built upon the following assumptions/axioms. The term axiom shall be understood in a slightly different way than in the classical Euclidian geometry. As we will see, this new geometry needs more than logic to derive its statements and facts.
1.1 - Assumptions
- A1: The point is the fundamental element. It shall be imagined as a perfect infinitesimal sphere.
- A2: Once a point exist - it has the potential of generating a neighboring space around him. This neighboring space is composed of identical infinitesimal spheres.
- A3: All the points/infinitesimal spheres from a neighboring space are obtained by translating the initial seed point. Rotation is not allowed.
- A4: Multiple seed points can exist independently of each other, forming multiple neighboring spaces. The space is the combination of the neighboring spaces.
1.2 - Notes
Close packing of spheres is the key to understanding and setting on a firm ground many shaky concepts and explanations from math, physics and science in general. I hope I’m able to start explaining what I mean in a way that makes sense to everyone.
I will be very loose first – just to make the main idea easier to grasp:
Let’s imagine that space is made-up from points. Science and math today consider points as being non-dimensional shapeless with no size and without any feature – no attributes – basically the points are nothing. In most people minds these points are something like very, very small dots on a sheet of paper. They are usually imagined as being circular – not that this will have any influence on the theory built on this nothingness.
The points are sometimes defined as the end of line segments, or the intersection of two straight lines. With some logic one can infer that a line is made-up from an infinite number of points. If we imagine a mental experiment in which we have a line and intersect this line with any number of other lines, under any imaginable angles, the intersection is always a point; so the conclusion is that a line might be made up from points. But how these dimensionless points can form a line – which is called a "one dimension object"?
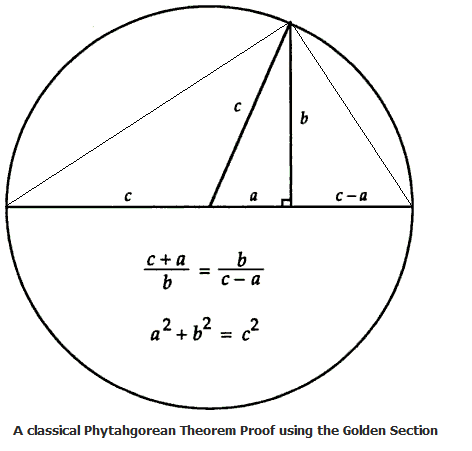
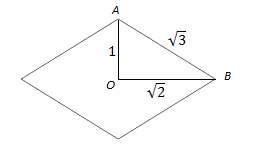
What I propose is to think about points as spheres. We associate a shape to the points – even if we keep the size infinitely small. There is an argument in Leibnitz where he considers the ratios for a series of similar triangles – see Figure 1.1 below:
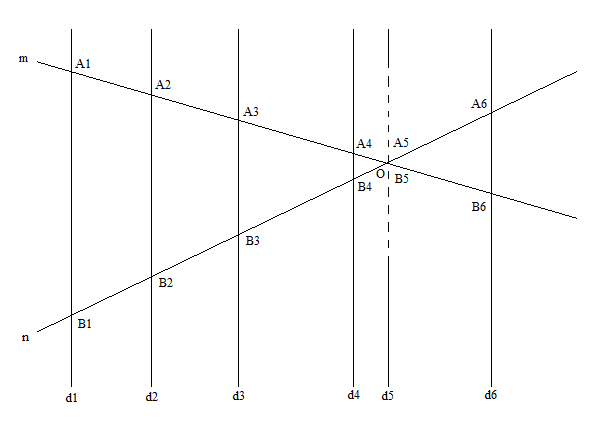
Figure 1.1: Similar Triangles Argument
The argument goes like this:
Let’s consider two lines (m) and (n) intersecting in point O. Let’s then consider another line (d) that translates – moves parallel relative to its initial position (d1) passing through all the points of (m) and (n). If A1, A2, … are the intersection of (d) and (m) and B1, B2, … are the intersection of (d) with (n), then all triangles OAB are similar:

Leibnitz argues that the triangle formed when point A, B, and O overlap is similar with all the other ones – even if this is an infinitely small triangle. One can even write a relationship between the sizes of this infinitely small triangle:

These days, using calculus (discovered by Leibnitz) we are used to the idea that zero divided by zero can be finite and a well-defined finite number.
I propose a similar approach for the investigation of the features and structures of the physical space and matter in general. By extension this will also apply to the virtual spaces - used when analyzing and interpreting physical measurements or abstract quantities.
The point I want to make by starting with the Leibnitz's example is that even if some quantities are zero (infinitesimally small) some ratios that involves these quantities have meaning and keep the values they have when the quantities are not zeros.
Let’s imagine the points as being identical spheres – spheres with the same radius. The patterns, structures and properties discover in packing of spheres can be extended to the infinitely small domain – by the same argument described above.
Extrapolating from here – the angle between two radiuses that joint the center of a sphere with the points of contacts on the sphere in the close-packing remain the same as when the spheres have some radius. The measurement of the angle is a ratio – so this makes totally sense and is consistent with the accepted results of the calculus.
The measurement of an angle is always given by a ratio.
The angles are equal in similar triangles – the sizes of triangles do not matter. The ratios are the way to express relationships between sizes.
Why use spheres? A good way of responding to this question can be found in Amy C Edmondson book “A Fuller Explanation: The Synergetic Geometry of R. Buckminster Fullerâ€, 1987.
On page 102 she writes:
“The sphere's shape presents no corners, no angles - in short, no landmarks - by which to detect rotation or reflection. Its very shapelessness enables us to explore the shape of space. Furthermore, the total absence of angular form makes the precisely sculpted shapes generated by packing the identical "shapeless" units together all the more surprising. It is easy to see that individual spheres, as omni-symmetrical forms with neither surface angles nor specific facets to mold the form of clusters, cannot determine through their own shape the overall shape of packings. In conclusion, we are interested … in using spheres packing … as a medium through which spatial constraints can take visible shape.â€
It can be said that the sphere is the simplest object in the universe but it has an infinite potential of creating patterns.
The sphere is the simplest mental object in terms of the way it is described. It is a featureless object. It has no lines, no corners, no faces, and no edges; it is just a close continuous surface with a constant curvature defined by its radius. It is in this context a one “dimension†object – defined by only one number – the radius.
In the same time the sphere has the potential of creating all the possible geometrical patterns existing in the Universe – through the close packing. Isn’t this amazing?
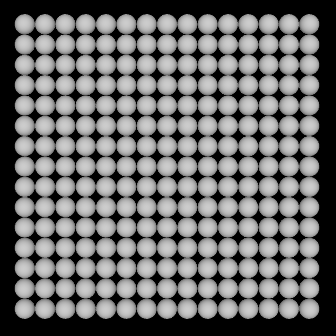
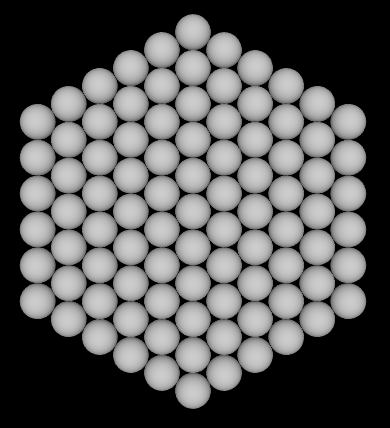
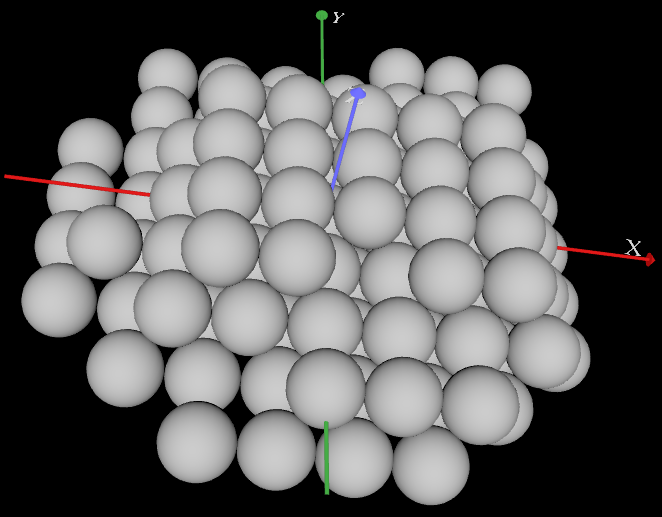
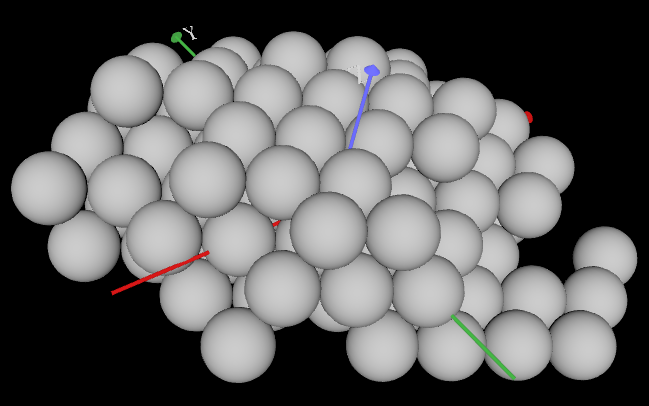
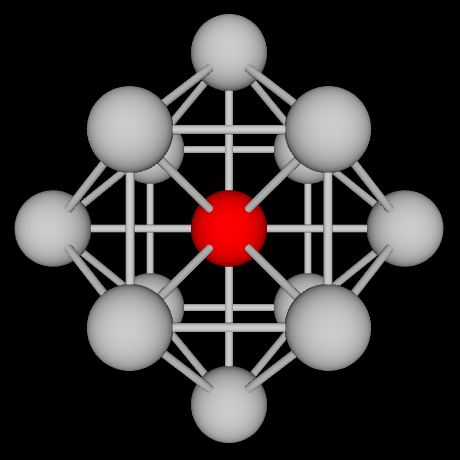
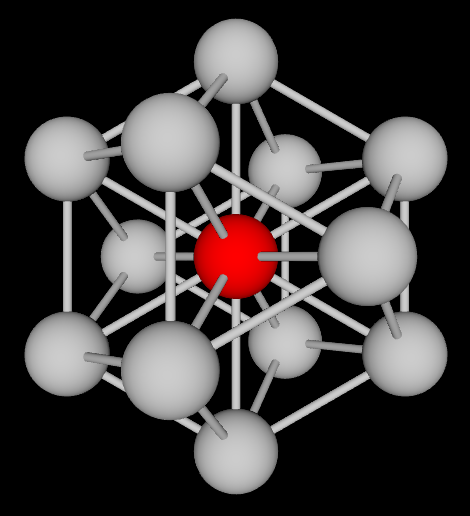
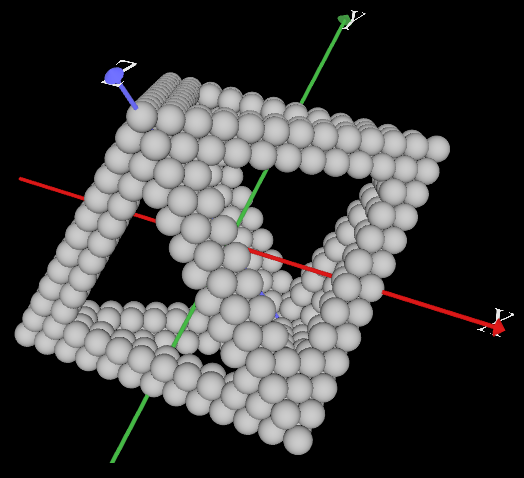
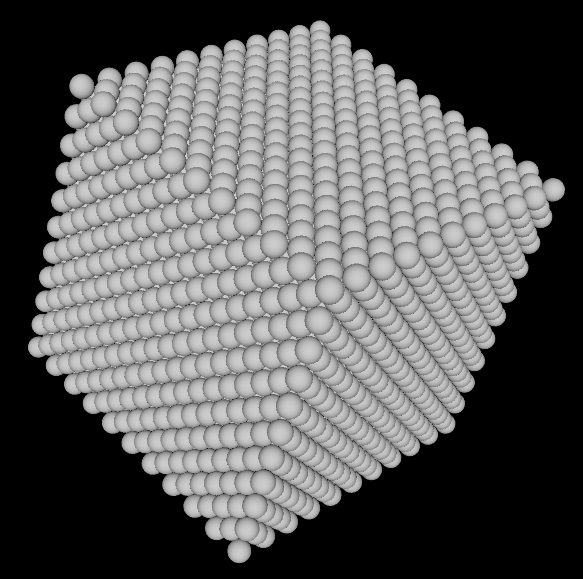
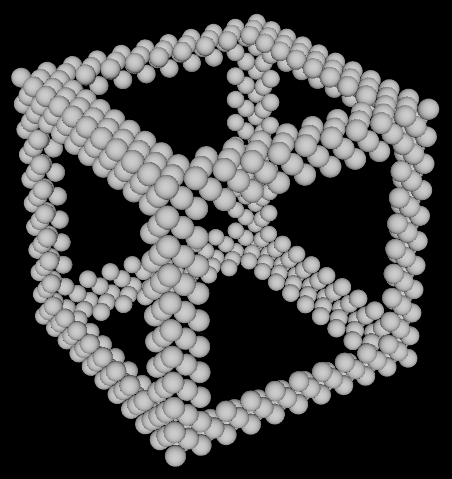
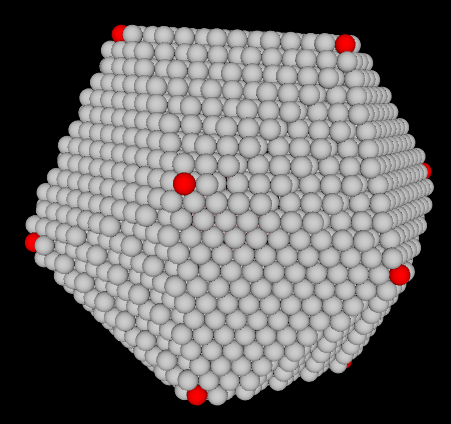
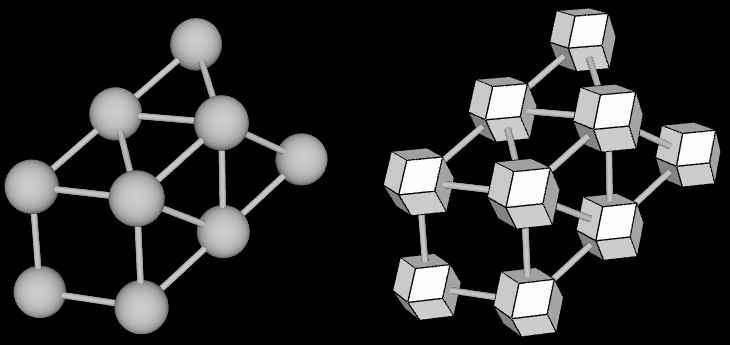
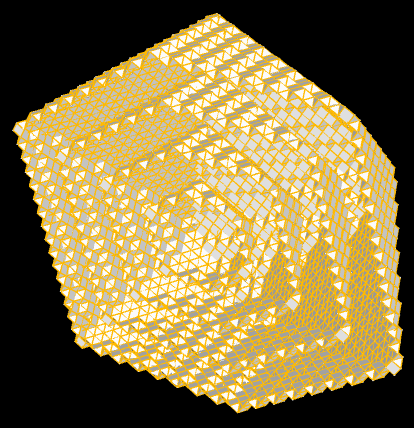
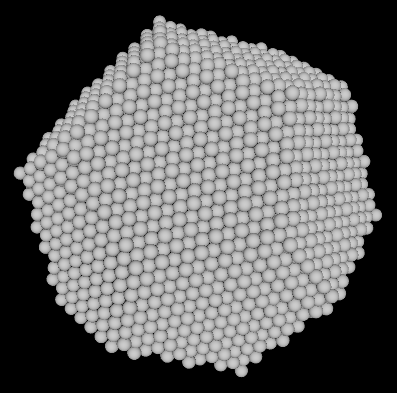
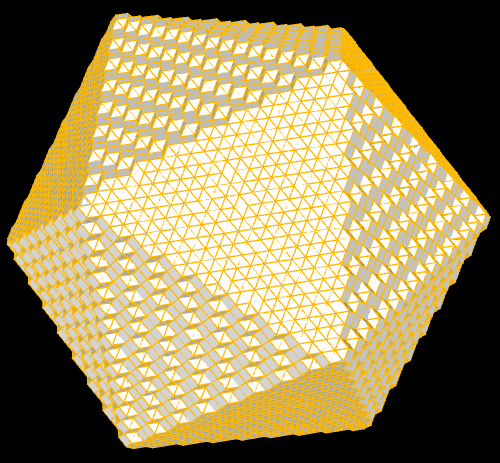
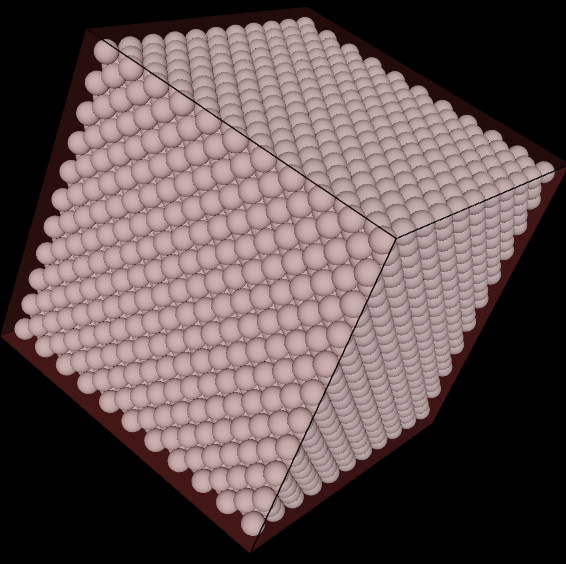
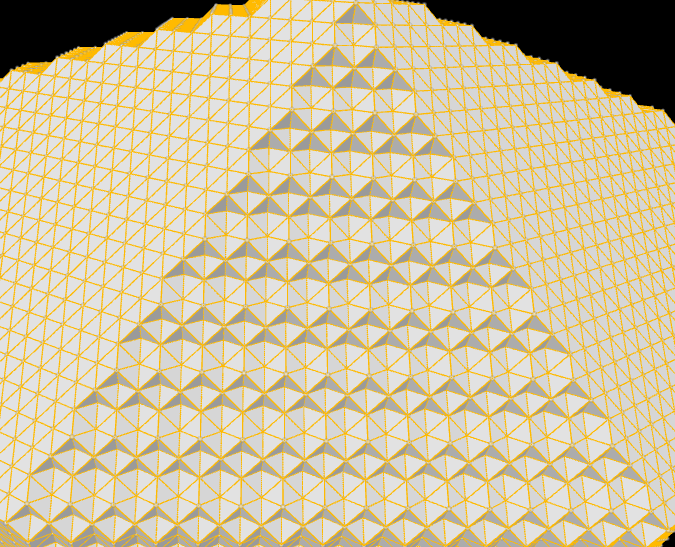
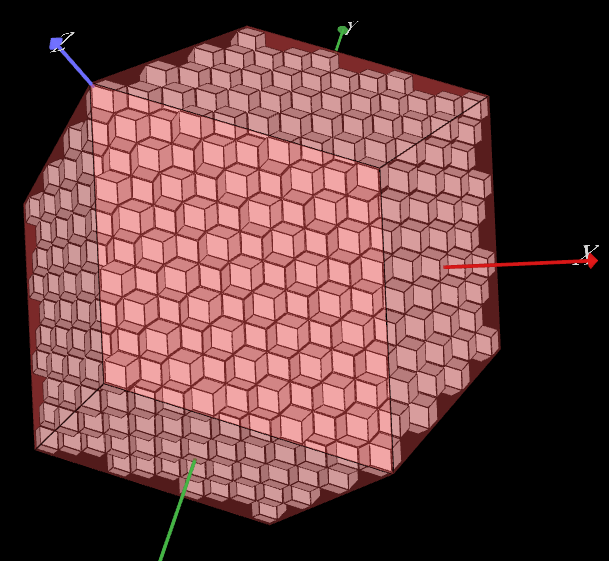
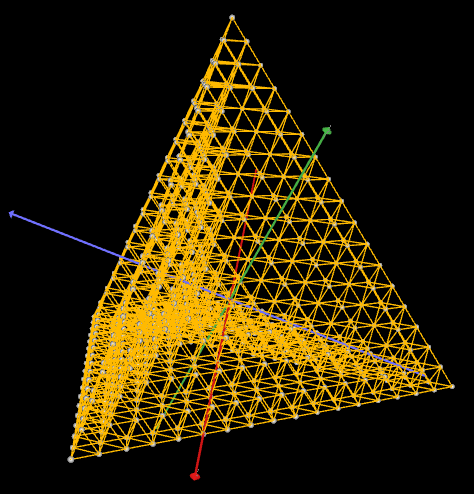
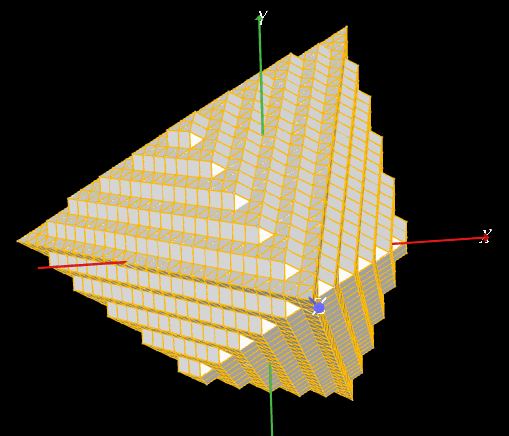
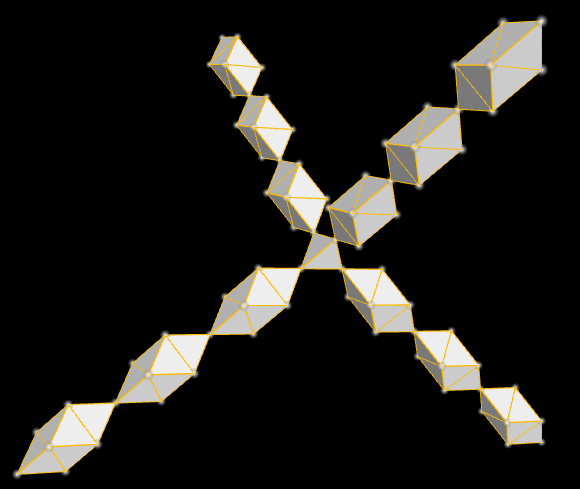
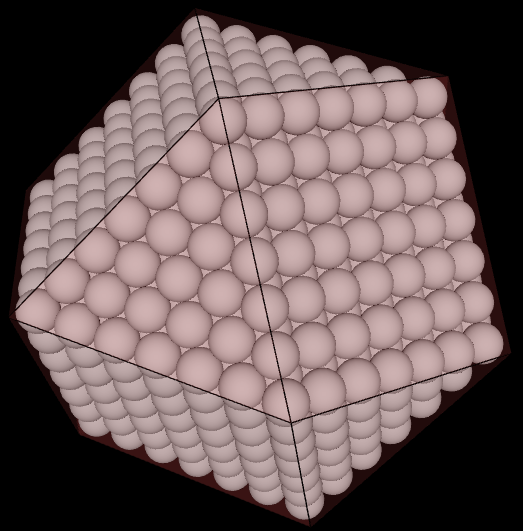
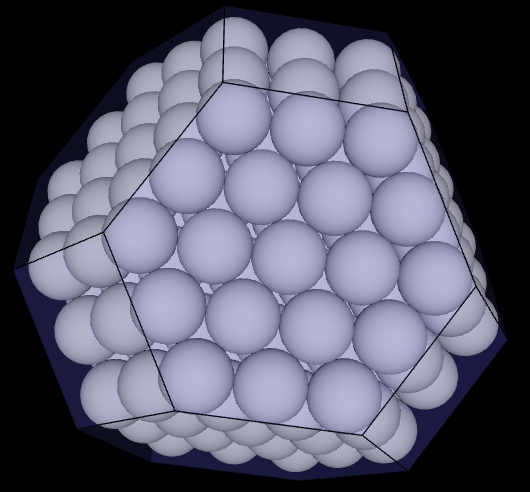
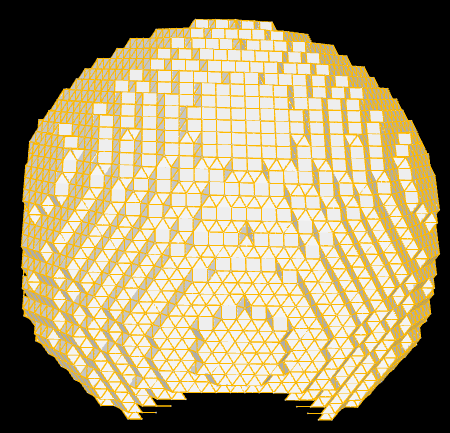
Once a point comes into existence, it creates a potential neighboring space of empty spherical cells arranged according to the close-packing of sphere. Close packing of sphere is obtained by translating the initial sphere and filling-up the space - more on this on the next page. It has been shown that close-packing of spheres is the most efficient way of filling-up the space.
Multiple independent points can generate their own potential neighboring spaces following the process described above. The relative position of two points from two sub-spaces is described by translation and rotation - a distance and an angle.